
Selected Projects
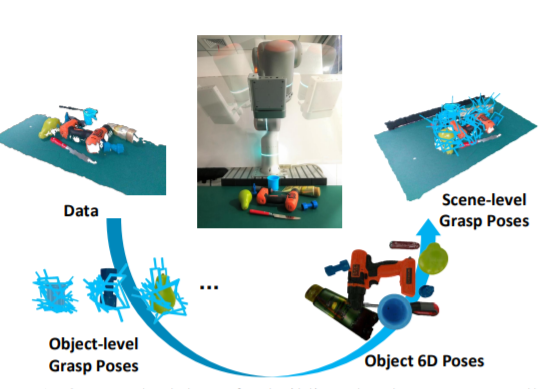
GraspNet
GraspNet is an open project for general object grasping that is continuously enriched. Currently we release GraspNet-1Billion, a large-scale benchmark for general object grasping, as well as other related areas (e.g. 6D pose estimation, unseen object segmentation, etc.).
OCRTOC
OCRTOC is a cloud-based benchmark for robotic grasping and manipulation. The benchmark focuses on the object rearrangement problem, specifically table organization tasks, which is an essential capability for service robots and requires breakthrough technology to make it mature. We provide a set of identical real robot setups and facilitate remote experiments of standardized table organization scenarios in varying difficulties.

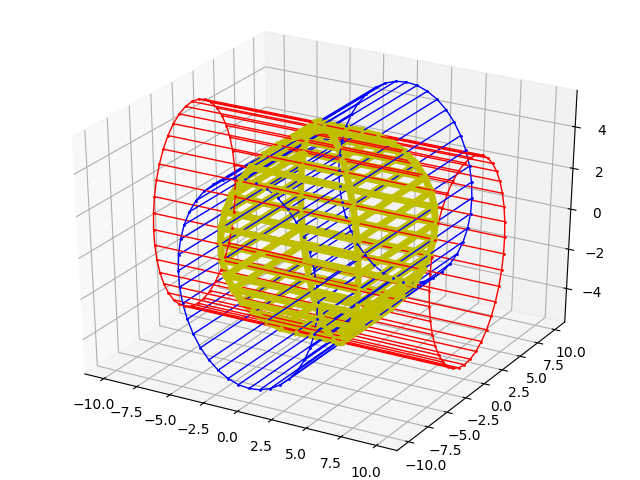
Geometry3D
Geometry3D is a Python 3D computational geometry library developed by myself. It originates from part of one project and I expand it into a complete library.
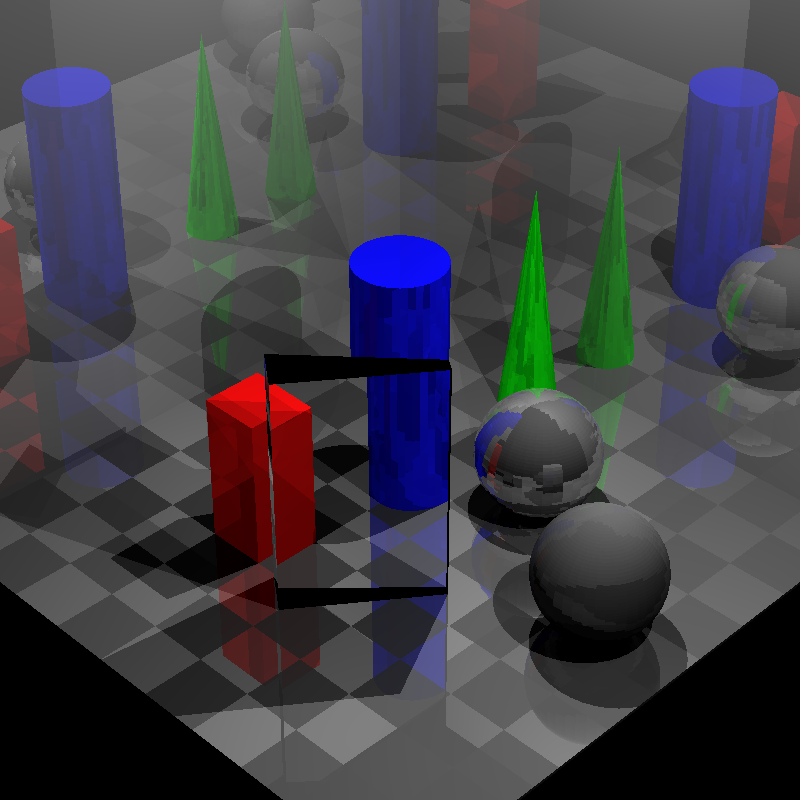
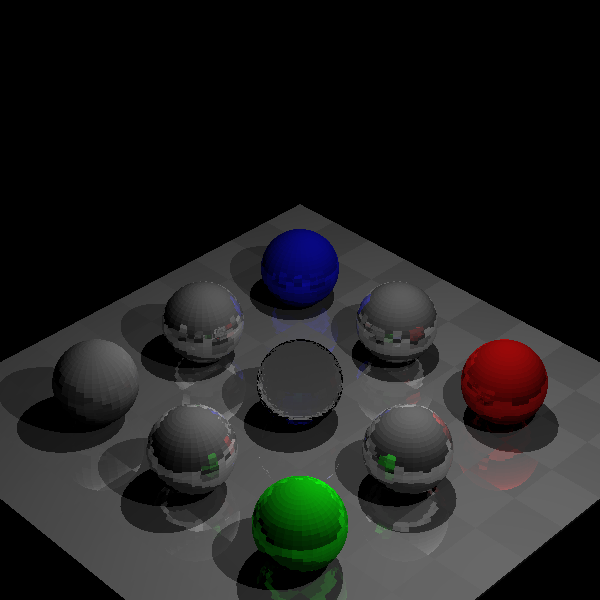
NaiveRT
NaiveRT is a ray-tracing algorithm implementation using pure Python. The geometry lib I use is Geometry3D.
Prosthetic Hand
This is my undergraduate graduation project. We help amputees by equipping them with a prosthetic hand controled by EMG signals of their arms.
Plum Machine
Plum machine is an automated carving machine to process the traditional food “Carved Plum” in Yunnan province, China.